Yifei Simon Shao (邵逸飞)
🐭🐭🐭 From Hangzhou, China

GRASP Lab
University of Pennsylvania
Philadelphia, PA
Generalist robots will be around humans before they can be fully autonomous! I want human and robots to collaborate in a way that is efficient, safe, and scalable.
I am a 4th year PhD student at UPenn’s GRASP Lab, developing generalizable, provable and VLM-driven robot systems for long-horizon, real-world physical human robot collaboration. I excel at bringing theory to hardware in quadrotors, mobile manipulators, quadrupeds, and autonomous vehicles. First-author papers in T-RO, RSS, RA-L, and ICRA.
I run a red note account that interviews robotics researchers and shoot live demos of their work. If you’d like more people to see your work, please email me! RedNote.
I am co-advised by Prof. Vijay Kumar and Prof. Pratik Chaudhari. I also work very closely with Prof. Nadia Figueroa.
See my Google Scholar for a complete list of publications.
Click on videos to zoom in!
selected publications
- IROS
 Collision Detection for Low-Cost Robot Manipulators Using Probabilistic Residual Torque ModelingIROS, 2025
Collision Detection for Low-Cost Robot Manipulators Using Probabilistic Residual Torque ModelingIROS, 2025 - ICRA
 Symskill: Symbol and Skill Co-Invention for Data-Efficient and Real-Time Long-Horizon ManipulationIn IEEE International Conference on Robotics and Automation (ICRA), 2026
Symskill: Symbol and Skill Co-Invention for Data-Efficient and Real-Time Long-Horizon ManipulationIn IEEE International Conference on Robotics and Automation (ICRA), 2026 - CoRL Workshop
 Maestro: Orchestrating Robotics Modules with Vision-Language Models for Zero-Shot Generalist Robots2025
Maestro: Orchestrating Robotics Modules with Vision-Language Models for Zero-Shot Generalist Robots2025 - RSS
 Don’t Yell at Your Robot! Constraint-Aware Intent Estimation for Dynamic Human-Robot Object Co-ManipulationRobotics: Science and Systems, 2024
Don’t Yell at Your Robot! Constraint-Aware Intent Estimation for Dynamic Human-Robot Object Co-ManipulationRobotics: Science and Systems, 2024 - T-RO
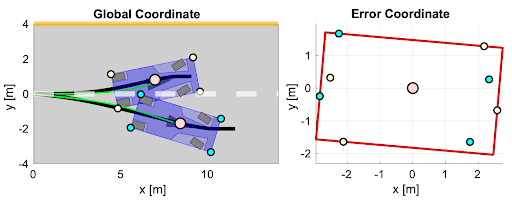
 Refine: Reachability-based trajectory design using robust feedback linearization and zonotopesIEEE Transactions on Robotics, 2024
Refine: Reachability-based trajectory design using robust feedback linearization and zonotopesIEEE Transactions on Robotics, 2024 - ICRA
 Design and evaluation of motion planners for quadrotors in environments with varying complexitiesIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
Design and evaluation of motion planners for quadrotors in environments with varying complexitiesIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024 - RA-L
 Reachability-based trajectory safeguard (rts): A safe and fast reinforcement learning safety layer for continuous controlIEEE Robotics and Automation Letters, 2021
Reachability-based trajectory safeguard (rts): A safe and fast reinforcement learning safety layer for continuous controlIEEE Robotics and Automation Letters, 2021
news
| Feb 16, 2026 | Tidybot Universe is online! A skills and services sharing platform where humans and AI agents collaborate to program robots together. |
|---|---|
| Feb 13, 2026 | SymSkill accepted to ICRA 2026 |
| Oct 24, 2025 | I chaired workshop at IROS 2025: RoboGen: 3D World Generation for Robot Learning and Autonomous Systems. The workshop was a great success. My talk can be found here. |
| Oct 16, 2025 | My paper EgoPartner: VLM Ego-Centric Action Recognition and Cost-Aware Task Allocation for Human Robot Collaboration accepted to IROS 2025 Workshop: Human-in-the-loop Robot Learning in the Era of Foundation Models. |
| Sep 27, 2025 | Won Best Paper Award (5%) at CoRL Learning Effective Abstraction for Planning Workshop 2025 for SymSkill: Low-Data Symbol and Skill Learning |
| Sep 27, 2025 | Oral Presentation (20%) at CoRL RoboArena Workshop 2025 for Maestro: VLM-Based Modular Generalist Robot. Contact me if you want to bring Maestro to your own quadrupedal mobile manipulator! |
| Jun 30, 2025 | Paper on fast collision detection using GMM for manipulators accepted to IROS 2025 |
| Sep 01, 2024 | Started Research Scientist Internship at Amazon Lab126 working on next-generation robotics! |
| Jul 19, 2024 | Paper Constraint-Aware Intent Estimation for Dynamic Human-Robot Object Co-Manipulation accepted to RSS 2024 and Don’t Yell at Your Robot! accepted to RSS GenAI-HRI Workshop 2024 |
| Apr 29, 2024 | Paper on Two Stage Motion Planning accepted to ICRA 2024, making it possible for the first time to choose the best planner for your environment. |